- 基础参数
- 转换参数
十进制年 (decimal year)
椭球定义
椭球半长轴,单位为米
椭球扁率的倒数,1/f
十进制年 (decimal year)
椭球定义
椭球半长轴,单位为米
椭球扁率的倒数,1/f
如果输入历元与输出历元不同,则必须提供速度矢量或者欧拉矢量
单位为 m/a ,米/年
单位为 m/a ,米/年
单位为 m/a ,米/年
单位为 rad/Ma ,弧度/百万年
单位为 rad/Ma ,弧度/百万年
单位为 rad/Ma ,弧度/百万年
十进制年 (decimal year)
单位为 mm , 毫米
单位为 mm , 毫米
单位为 mm , 毫米
单位为 ppb , 10⁻⁹
单位为 mas , 豪角秒
单位为 mas , 豪角秒
单位为 mas , 豪角秒
单位为 mm/a , 毫米/年
单位为 mm/a , 毫米/年
单位为 mm/a , 毫米/年
单位为 ppb/a , 10⁻⁹/年
单位为 mas/a , 豪角秒/年
单位为 mas/a , 豪角秒/年
单位为 mas/a , 豪角秒/年
在线WGS84和CGCS2000坐标高精度转换工具,支持不同版本的WGS84坐标和CGCS2000坐标互相转换。输入的坐标支持XYZ空间直角坐标和LBH大地坐标。转换支持历元计算和ITRF框架间坐标转换。
在线WGS84和CGCS2000坐标转换工具,支持 WGS84 坐标和 CGCS2000 坐标之间的高精度互相转换。
-
本工具支持的 CGCS2000 版本和 WGS84 版本如下:
版本名称 发布时间 参考框架 参考历元 主要改进 适用场景 CGCS2000 2008 ITRF97 2000.0 地心坐标系,提高精度 全国统一的、协调一致的坐标系统 WGS84 (G2135) 2021 ITRF2020 2020.0 增强多GNSS兼容性 多系统融合定位(GPS/北斗等) WGS84 (G1762) 2015 ITRF2014 2015.0 更新速度模型,支持实时动态 实时动态定位(RTK) WGS84 (G1674) 2013 ITRF2008 2005.0 与ITRF2008对齐,厘米级精度 精密导航、地球科学研究 WGS84 (G1150) 2001 ITRF97 2001.0 融合更多地面观测站数据 高精度地理信息系统(GIS) WGS84 (G873) 1996 ITRF94 1997.0 提高动态框架精度至分米级 商业卫星定位、测绘 WGS84 (G730) 1994 ITRF91 1994.0 首次引入卫星跟踪数据 民用GPS增强 - 输入坐标:支持输入笛卡尔空间直角坐标系坐标(地心地固坐标,XYZ)和大地坐标(大地经度,大地纬度,大地高,LBH)。 使用逗号分隔值,每行输入一组坐标。支持输入多行。 空间直角坐标格式为 X , Y , Z,单位为米(m) 。 大地坐标格式为 L , B , H,经度和纬度单位为度(degree),高程单位为米(m) 。
-
基础参数:设置 WGS84 和 CGCS2000 坐标转换的基础参数。
- 转换类型:选择 WGS84 坐标转 CGCS2000 坐标,或者 CGCS2000 坐标转 WGS84 坐标。
- WGS84 版本:选择 WGS84 坐标的版本,本工具支持 WGS84 (G2135), WGS84 (G1762), WGS84 (G1674), WGS84 (G1150), WGS84 (G873), WGS84 (G730) 等版本。
- WGS84 历元:输入的 WGS84 坐标的观测历元。
- WGS84 坐标类型:选择 WGS84 坐标的类型,支持 XYZ - 地心地固坐标 和 LBH - 大地坐标 。 如果选择的坐标类型为大地坐标,则必须设置椭球参数,坐标转换时,会自动将大地坐标转换为地心地固坐标,再进行计算。
- CGCS2000 版本:固定为 CGCS2000 。
- CGCS2000 历元:固定为 2000.0 。
- CGCS2000 坐标类型:选择 CGCS2000 坐标的类型,支持 XYZ - 地心地固坐标 和 LBH - 大地坐标 。 如果选择的坐标类型为大地坐标,则必须设置椭球参数,坐标转换时,会自动将大地坐标转换为地心地固坐标,再进行计算。
-
转换参数:设置 WGS84 和 CGCS2000 坐标转换相关的的框架转换参数和历元计算参数。
-
速度类型:如果输入的观测历元和输出的结果历元不同,则必须提供速度信息。
本工具支持两种方式提供速度信息:
速度矢量:直接填写 vx, vy, vz 速度值,单位为 m/a, 米/年 。
欧拉矢量:填写欧拉矢量 Ωx, Ωy, Ωz,单位为 rad/Ma, 弧度/百万年。使用欧拉矢量和测站坐标计算速度值。 - 自定义:点击自定义,将展示 ITRF 框架转换的 14 个参数和参考历元。您可以修改这些参数值,从而使用自定义参数转换。
- 输入ITRF:输入坐标所在的 ITRF 框架。 WGS84 转 CGCS2000 时,即为 WGS84 坐标的 ITRF 框架。 CGCS2000 转 WGS84 时,即为 CGCS2000 坐标的 ITRF 框架。
- 输出ITRF:输出坐标所在的 ITRF 框架。 WGS84 转 CGCS2000 时,即为 CGCS2000 坐标的 ITRF 框架。 CGCS2000 转 WGS84 时,即为 WGS84 坐标的 ITRF 框架。
- 选择不同的转换类型和 WGS84 版本,会自动设置输入 ITRF 和输出 ITRF。 本工具会根据输入 ITRF 框架和输出 ITRF 框架,自动填充坐标转换相关的参数和参考历元。 您可以点击自定义按钮,查看填充的参数值。同时您也可以修改转换使用的参数值。 输入 ITRF 和输出 ITRF 仅用于自动填充 ITRF 框架间转换参数,不参与实际计算。
- 参考历元:ITRF 框架转换参数的参考历元。
- tx:x 轴平移,单位为 mm, 毫米。
- ty:y 轴平移,单位为 mm, 毫米。
- tz:z 轴平移,单位为 mm, 毫米。
- d:缩放因子,单位为 ppb, 10⁻⁹ 。
- rx:x轴旋转角,单位为 mas, 毫角秒 。
- ry:z轴旋转角,单位为 mas, 毫角秒 。
- rz:z轴旋转角,单位为 mas, 毫角秒 。
- txv:x轴平移速度,单位为 mm/a, 毫米/年。
- tyv:y轴平移速度,单位为 mm/a, 毫米/年。
- tzv:z轴平移速度,单位为 mm/a, 毫米/年。
- dv: 缩放因子变化速度,单位为 ppb/a, 10⁻⁹/年。
- rxv:x 轴旋转角速度,单位为 mas/a, 豪角秒/年。
- ryv:y 轴旋转角速度,单位为 mas/a, 豪角秒/年。
- rzv:z 轴旋转角速度,单位为 mas/a, 豪角秒/年。
-
速度类型:如果输入的观测历元和输出的结果历元不同,则必须提供速度信息。
本工具支持两种方式提供速度信息:
- 打开文件:支持打开 UTF-8 编码的文本文件。
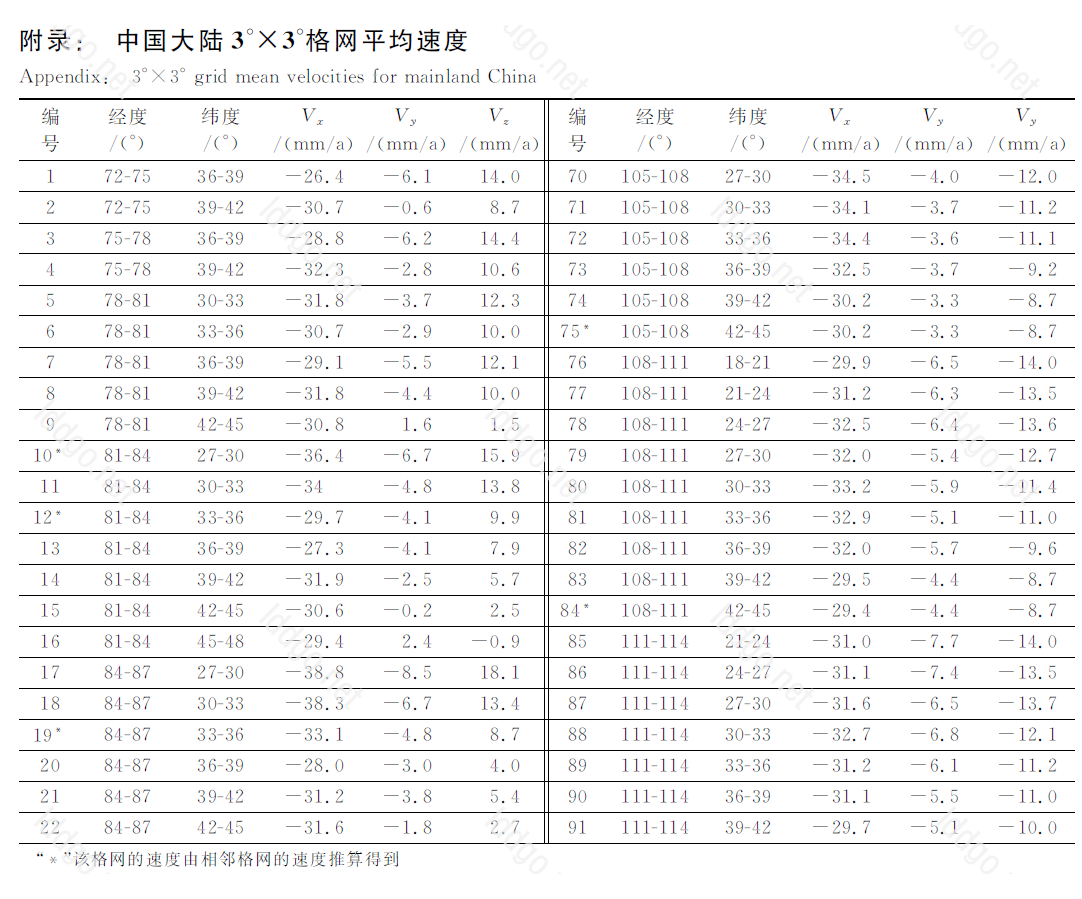
- 本工具计算的过程为:a. 不同 ITRF 框架间的转换参数历元归算 b. 板块运动改正 c. 使用 a 步骤确定的七参数进行坐标转换。 坐标转换精度高度依赖于提供的速度场数据,如果没有本地的高精度速度场信息,可以使用本工具附录中的中国大陆3x3度速度场数据 或者使用 CGCS2000 板块欧拉矢量数据。 使用中国大陆3x3度速度场数据的转换精度,一般在毫米级至厘米级之间。
-
IGS 站点 WGS84 转 CGCS2000 示例。
使用参数:WGS84版本 - WGS84 (G1674), WGS84历元 - 2005.0, WGS84坐标类型 - XYZ 。
CGCS2000版本 - CGCS2000, CGCS2000历元 - 2000.0, CGCS2000坐标类型 - XYZ 。
速度参数来源 - 根据站点的 XYZ 坐标,使用本站的 XYZ 转 LBH 工具得到 LBH 坐标。然后查询表格 《中国大陆3x3度格网平均速度-速度场-CGCS2000》
得到速度数据。查表得到的速度单位需从 mm/a 转换为 m/a ,也即除以 1000 。
乌鲁木齐,长春,北京的站点速度取反作为参数。
站点 WGS84坐标 CGCS2000坐标 速度 转换的CGCS2000坐标 残差 N/A X (m) Y (m) Z (m) X (m) Y (m) Z (m) Vx (m/a) Vy (m/a) Vz (m/a) X (m) Y (m) Z (m) X (m) Y (m) Z (m) WUHN/武汉 -2267749.426 5009154.287 3221290.704 -2267749.263 5009154.311 3221290.709 -0.0315 -0.0085 -0.0116 -2267749.271778932 5009154.346067069 3221290.738206169 -0.008778932 0.035067069 0.029206169 SHAO/上海 -2831733.505 4675665.951 3275369.429 -2831733.363 4675666.015 3275369.466 -0.0298 -0.0101 -0.0132 -2831733.3608287573 4675666.016929227 3275369.471364079 0.0022 0.001929227 0.005364079 LHAS/拉萨 -106938.0326 5549269.52 3139215.874 -106937.804 5549269.587 3139215.789 -0.0443 -0.0087 0.0115 -106937.80822647549 5549269.582272761 3139215.79246651 -0.0042 -0.004727239 0.00346651 URUM/乌鲁木齐 193030.6314 4606851.291 4393311.462 193030.540 4606851.298 4393311.455 0.0298 0.0023 -0.0014 193030.48642357028 4606851.295608156 4393311.448628469 -0.0536 -0.002391844 -0.006372 CHAN/长春 -2674427.231 3757143.218 4391521.671 -2674427.313 3757143.205 4391521.625 0.0251 0.008 0.0102 -2674427.3606022364 3757143.1907928986 4391521.599623243 -0.0476 -0.01421 -0.025376757 BJFS/北京 -2148744.083 4426641.273 4044655.927 -2148744.179 4426641.266 4044655.880 0.0293 0.0059 0.0107 -2148744.2322619907 4426641.2584007485 4044655.852110395 -0.05326 -0.0076 -0.027889605 -
计算公式:
- 使用欧拉矢量计算测站速度公式: 。 公式中 Vx, Vy,Vz 为计算的速度值分量。 X, Y, Z 为测站坐标。 Ωx, Ωy, Ωz 为测站所在板块的欧拉矢量。
-
历元计算公式:将历元 t0 转换到历元 t 。
公式中 mr = 4.84813681*10⁻⁹ , 为 豪角秒 mas 到弧度 rad 的转换因子。 - 板块运动改正公式: 。 公式中 tc 为观测历元。t 为需转换的历元。 Xtc, Ytc, Ztc 为观测历元 tc 时的坐标。 Xs, Ys, Zs 为测站速度值。
-
框架间坐标计算公式:将 ITRFyy 框架的坐标 转换到 ITRFzz 框架。
公式中 [X Y Z]ITRFzz 为目标 ITRF 框架下的坐标。 [X Y Z]ITRFyy 为输入 ITRF 框架下的坐标。 Tx, Ty, Tz 为平移参数, D 为缩放因子, Rx, Ry, Rz 为旋转参数。
-
参考椭球基本参数
名称 长半轴(a) 扁率倒数(rf) WGS84 6378137 m 298.257223563 2000国家大地坐标系 6378137 m 298.257222101 -
参考资料:
- ITRF 框架间转换参数
-
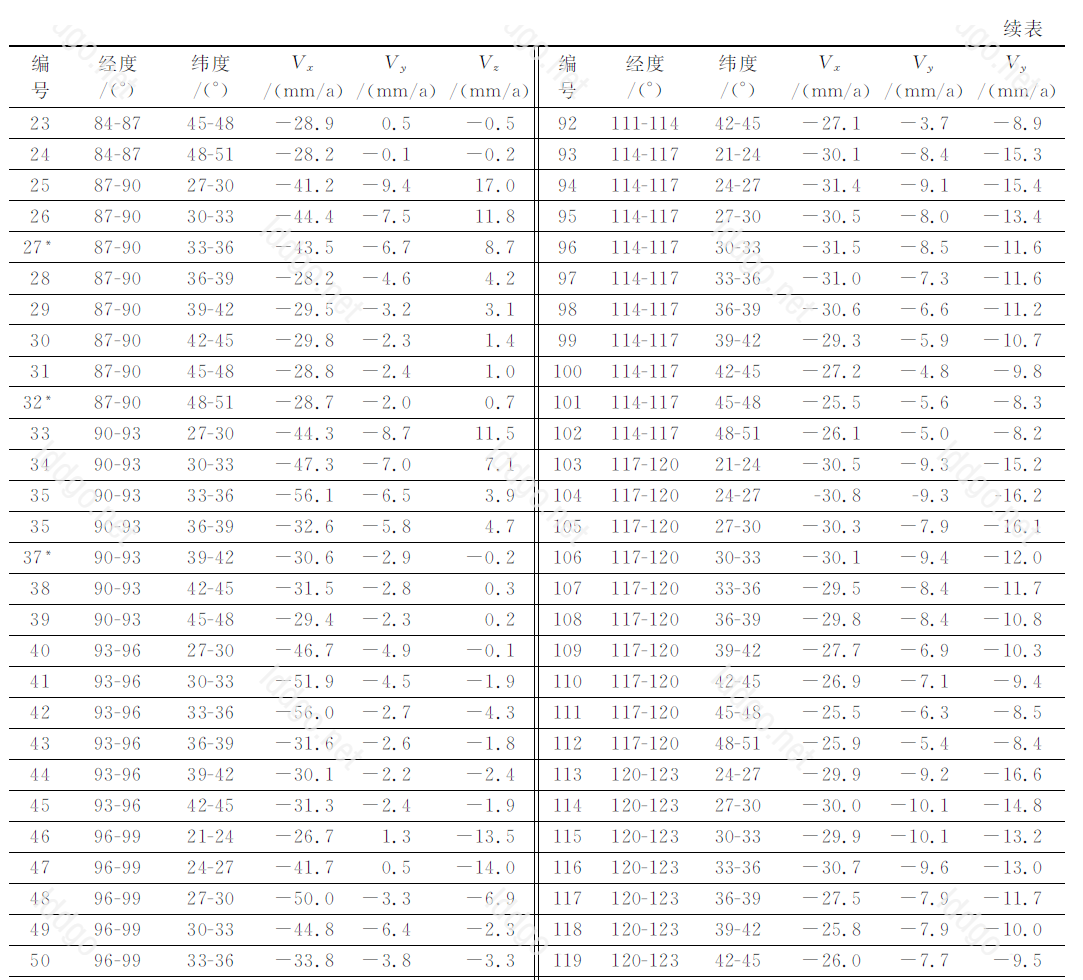
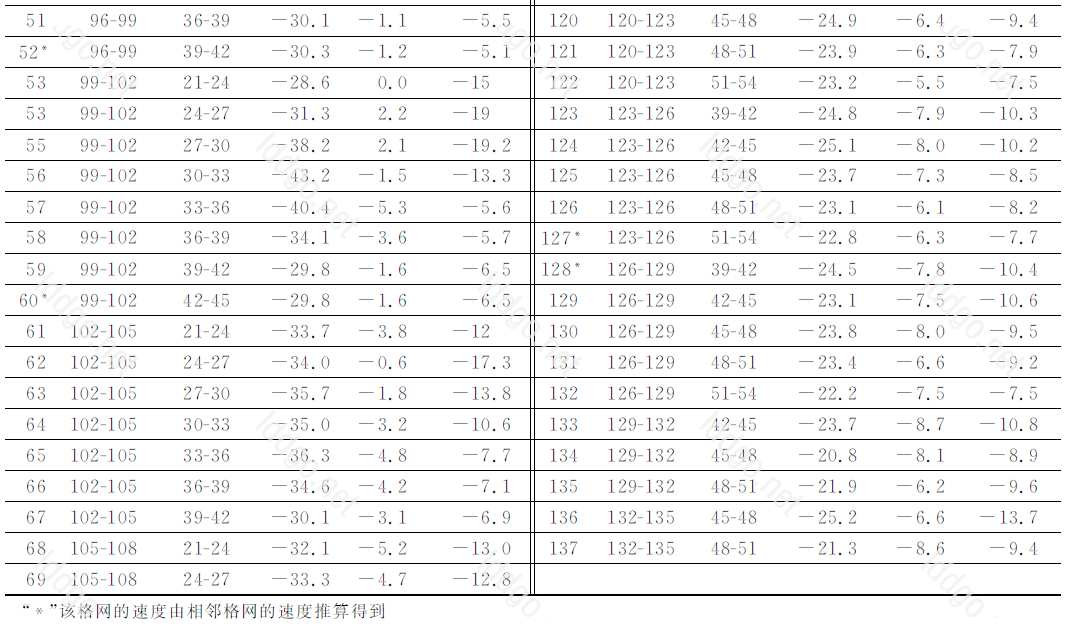
中国大陆3x3度格网平均速度-速度场-CGCS2000 。
网格点的计算速度值与其参考值之差的统计值分别为 ±1.81 mm/a, ±1.05 mm/a,
±1.55 mm/a, 位置运动速度的误差 ±2.61 mm/a 。
-
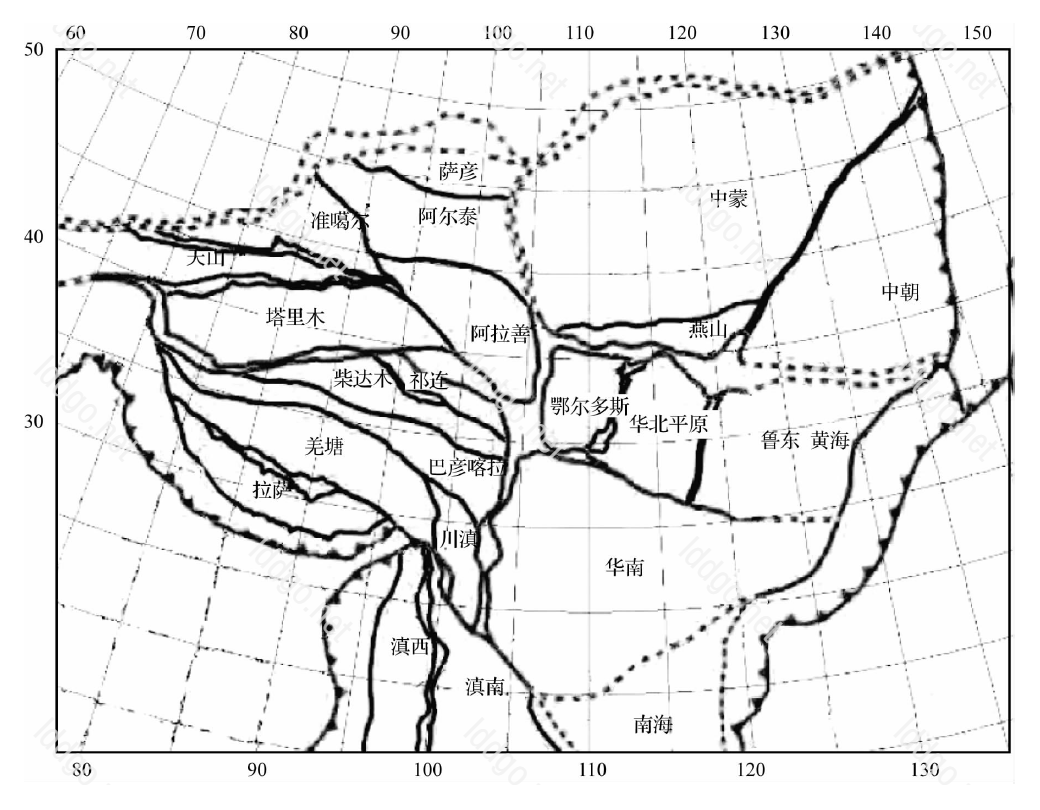
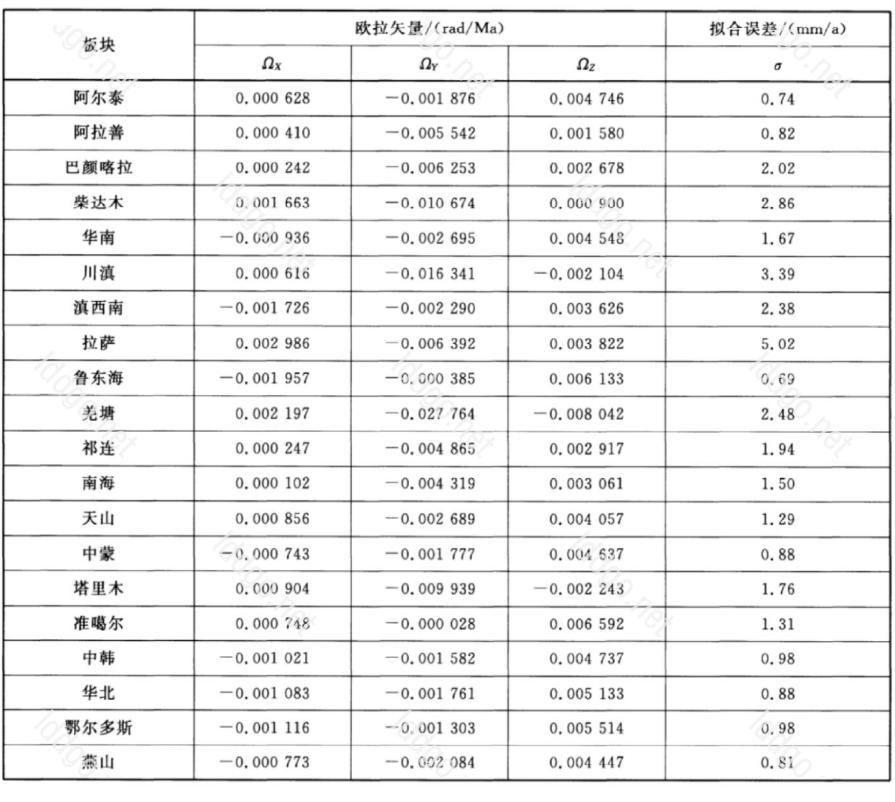
大地测量控制点坐标转换技术规范 (CH/T 2014-2016) ,其中包含 CPM-CGCS2000 20个板块欧拉矢量表格。
-
本工具有一定的使用频率限制,请合理使用本工具。
游客:30次/IP*小时,普通用户:30次/小时,VIP:360次/小时,高级VIP:360次/小时。
游客和普通用户一次只能输入一组坐标,不支持批量转换。VIP和高级VIP用户支持批量转换。
