- Basic Parameters
- Convert Parameters
decimal year
Ellipsoid definition
Ellipsoid Semi-major axis given in meters
Reverse flattening of the ellipsoid, 1/f
decimal year
Ellipsoid definition
Ellipsoid Semi-major axis given in meters
Reverse flattening of the ellipsoid, 1/f
If the input epoch is different from the output epoch, velocity vector or Euler vector must be provided
The unis is m/a, meter/year
The unis is m/a, meter/year
The unis is m/a, meter/year
The unis is rad/Ma, radian/Million years
The unis is rad/Ma, radian/Million years
The unis is rad/Ma, radian/Million years
decimal year
The unis is mm, millimeter
The unis is mm, millimeter
The unis is mm, millimeter
The unis is ppb, 10⁻⁹
The unis is mas, milli arcsecond
The unis is mas, milli arcsecond
The unis is mas, milli arcsecond
The unis is mm/a, millimeter/year
The unis is mm/a, millimeter/year
The unis is mm/a, millimeter/year
The unis is ppb/a, 10⁻⁹/year
The unis is mas/a, milli arcsecond/year
The unis is mas/a, milli arcsecond/year
The unis is mas/a, milli arcsecond/year
Related Tools
Online WGS84 and CGCS2000 coordinates high-precision conversion tool, supports different versions of WGS84 coordinates and CGCS2000 coordinates conversion each other. The input coordinates support XYZ spatial cartesian coordinates and LBH geodetic coordinates. The conversion supports epoch calculation and ITRF framework coordinate conversion.
Online WGS84 and CGCS2000 coordinate conversion tool, supporting high-precision interconversion between WGS84 coordinates and CGCS2000 coordinates.
-
The CGCS2000 version and WGS84 version supported by this tool are as follows:
Version Release Time Frame Epoch Major Improvements Applicable Scenarios CGCS2000 2008 ITRF97 2000.0 Geocentric coordinate system for improved accuracy China's nationally standardized coordinate system WGS84 (G2135) 2021 ITRF2020 2020.0 Enhanced multi-GNSS compatibility Multi-system fusion positioning (GPS/BeiDou, etc.) WGS84 (G1762) 2015 ITRF2014 2015.0 Update speed modeling to support real-time kinematic Real-time kinematic positioning (RTK) WGS84 (G1674) 2013 ITRF2008 2005.0 Aligned with ITRF2008, centimeter-level accuracy Precision navigation, earth science research WGS84 (G1150) 2001 ITRF97 2001.0 Integration of additional ground-based observatory data High-precision geographic information systems (GIS) WGS84 (G873) 1996 ITRF94 1997.0 Improvement of dynamic frame accuracy to the decimeter level Commercial satellite positioning, mapping WGS84 (G730) 1994 ITRF91 1994.0 Introduction of satellite tracking data for the first time Civilian GPS Enhancement - Input Coordinates : Supports the input of Cartesian spatial rectangular coordinate system coordinates (ECEF coordinates, XYZ) and geodetic coordinates (geodetic longitude, geodetic latitude, geodetic height, LBH). Use comma-separated values to enter one set of coordinates per line. Multiple lines are supported. The spatial Cartesian coordinate format is X , Y , Z, the unit is the meter (m). The geodetic coordinate format is L , B , H, longitude and latitude are in degrees and elevation is in meters.
-
Basic Parameters : Sets the base parameters for WGS84 and CGCS2000 coordinate conversions.
- Convert Type : Select WGS84 to CGCS2000 or CGCS2000 to WGS84.
- WGS84 Version : Select the version of WGS84 coordinates, this tool supports WGS84 (G2135), WGS84 (G1762), WGS84 (G1674), WGS84 (G1150), WGS84 (G873), WGS84 (G730), and other versions. etc.
- WGS84 Epoch : Observation epoch for the input WGS84 coordinates.
- WGS84 Type : Select the type of WGS84 coordinates, XYZ - Geocentric and LBH - Geodetic coordinates are supported. If the selected coordinate type is geodetic, the ellipsoid parameter must be set, and the geodetic coordinates will automatically be converted to geocentric geoid coordinates for calculation during the coordinate conversion.
- CGCS2000 Version : Fixed to CGCS2000.
- CGCS2000 Epoch : Fixed to 2000.0 .
- CGCS2000 Type : Select the type of CGCS2000 coordinates, XYZ - Geocentric and LBH - Geodetic coordinates are supported. If the selected coordinate type is geodetic, the ellipsoid parameter must be set, and the geodetic coordinates will automatically be converted to geocentric geoid coordinates for calculation during the coordinate conversion.
-
Convert Parameters : Sets the frame conversion parameters and epoch calculation parameters
for WGS84 and CGCS2000 coordinate conversions.
-
Velocity Type : If the input observation epoch is different from the output result
epoch, velocity information must be provided.
This tool supports two ways to provide speed information:
Velocity Vector : Directly fill in the vx, vy, vz velocity values in m/a, meters per year.
Euler Vector : Fill in the Euler vectors Ωx, Ωy, Ωz in rad/Ma, radians per million years. Use the Euler vectors and station coordinates to calculate the velocity values. - Custom : Clicking Custom displays the 14 parameters and reference epoch for the ITRF framework conversion. You can modify these parameter values to use custom parameter conversions.
- Input ITRF : the ITRF framework of the input coordinates.
- Output ITRF : the ITRF framework of the output coordinates.
- Selecting different conversion types and WGS84 versions automatically sets the input ITRF and output ITRF. This tool automatically fills the parameters and reference epoch associated with the coordinate transformation based on the input ITRF frame and the output ITRF frame. You can click the Custom button to view the filled parameter values. You can also modify the parameter values used for the conversion. The Input ITRF and Output ITRF are only used to automatically fill the parameters for the conversion between ITRF frames and are not involved in the actual calculation.
- ITRF Epoch : Reference epoch for ITRF framework conversion parameters.
- tx : X-axis translation, in millimeters.
- ty : Y-axis translation, in millimeters.
- tz : Z-axis translation, in millimeters.
- d : Scaling factor, in ppb, 10⁻⁹.
- rx : The X-axis rotation angle is measured in mas, milli-arcseconds.
- ry : The Y-axis rotation angle is measured in mas, milli-arcseconds.
- rz : The Z-axis rotation angle is measured in mas, milli-arcseconds.
- txv : The translation speed of the X-axis is measured in millimeters per year (mm/a).
- tyv : The translation speed of the Y-axis is measured in millimeters per year (mm/a).
- tzv : The translation speed of the Z-axis is measured in millimeters per year (mm/a).
- dv : Scaling factor change rate, unit: ppb/a, 10⁻⁹/year.
- rxv : The rotational angular velocity on the X-axis is measured in mas/a and in milli-arcseconds/year.
- ryv : The rotational angular velocity on the Y-axis is measured in mas/a and in milli-arcseconds/year.
- rzv : The rotational angular velocity on the Z-axis is measured in mas/a and in milli-arcseconds/year.
-
Velocity Type : If the input observation epoch is different from the output result
epoch, velocity information must be provided.
This tool supports two ways to provide speed information:
- Open File : Support for opening UTF-8 encoded text files.
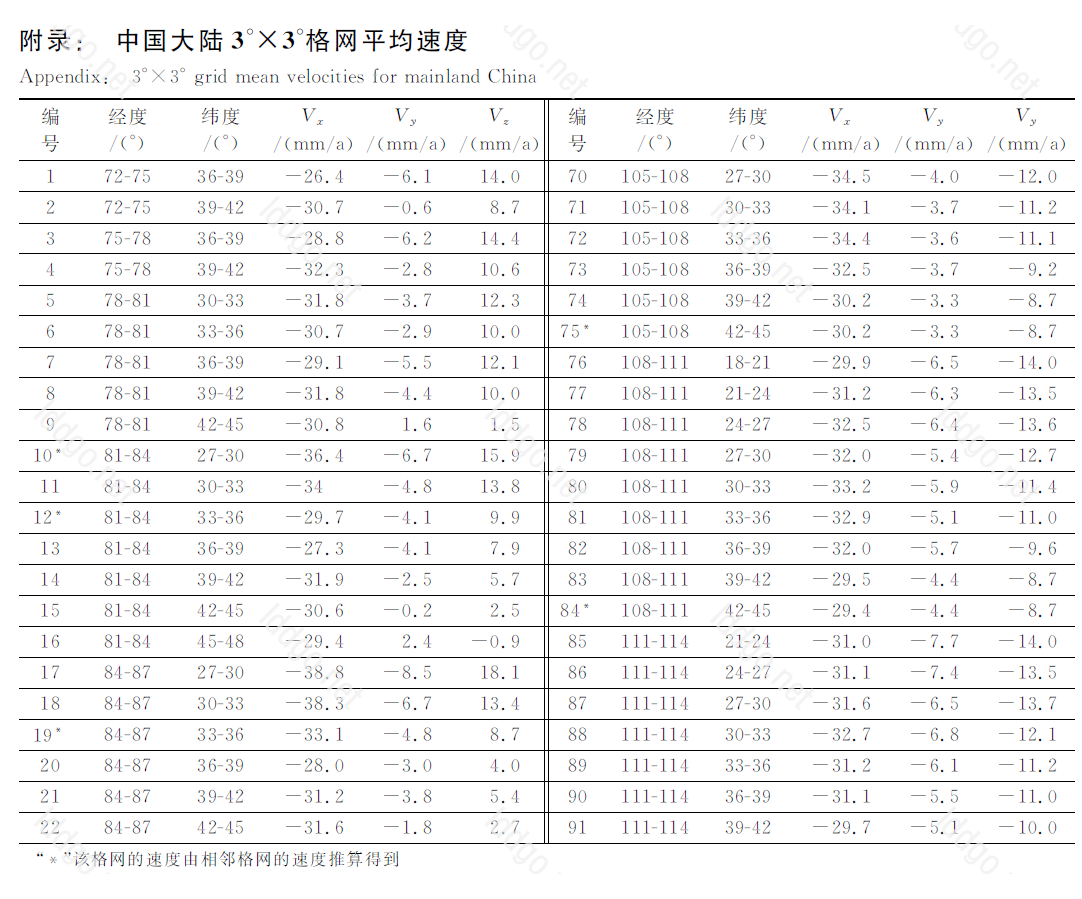
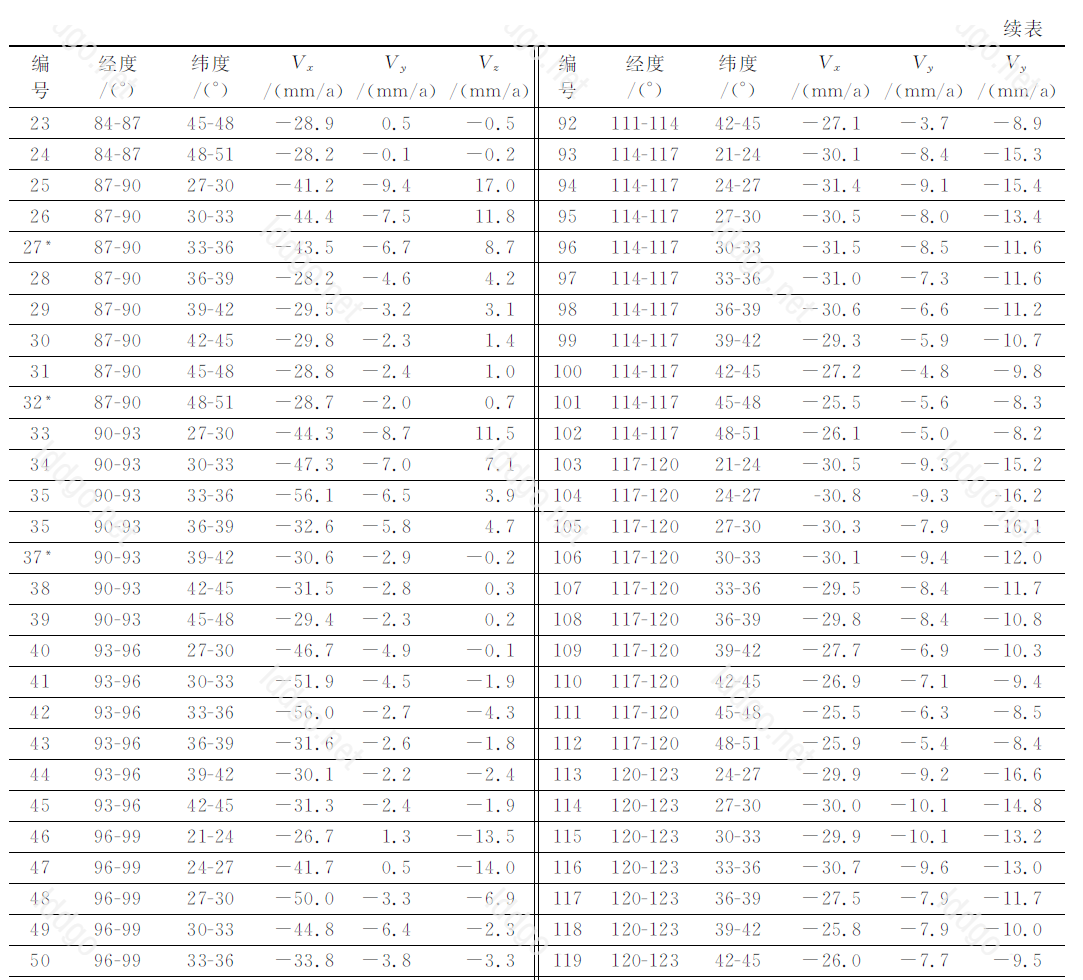
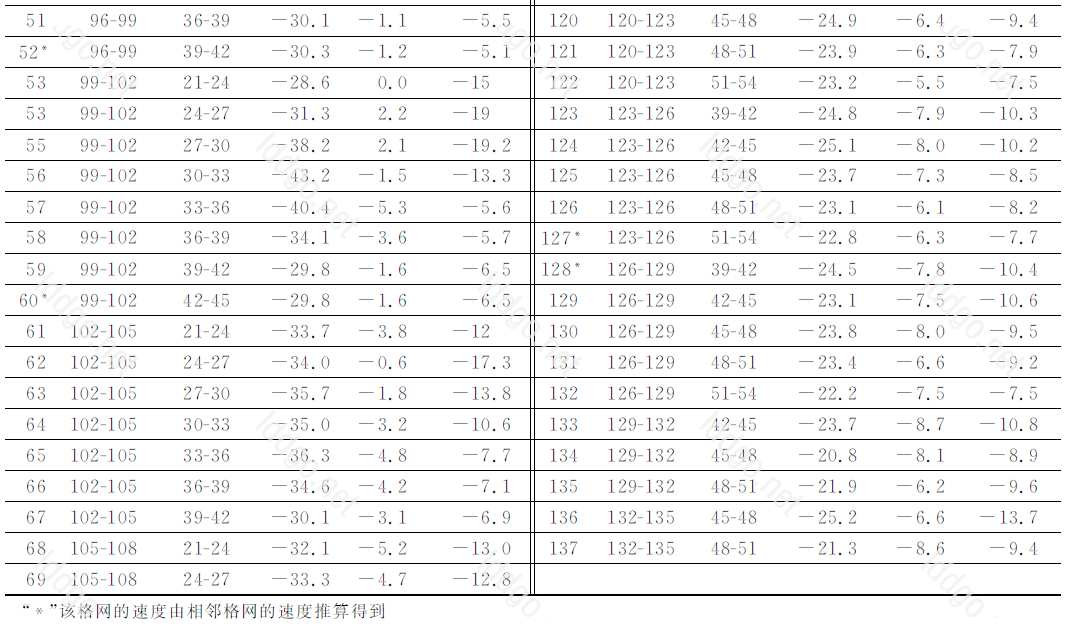
- The process of calculation in this tool is as follows: a. Epoch calculation of conversion parameters between different ITRF frames b. Plate motion correction c. Coordinate conversion using seven parameters determined in step a. The accuracy of the coordinate conversion is highly dependent on the velocity field data provided. If there is no local high-precision velocity field information, you can use the 3x3 degree velocity field data of mainland China in the appendix of this tool, or use the Euler vector data of CGCS2000 plate. The conversion accuracy of using Mainland China 3x3 degree velocity field data is generally between millimeter and centimeter level.
-
Example of IGS station WGS84 to CGCS2000.
Parameters used: WGS84 version - WGS84 (G1674), WGS84 epoch - 2005.0, WGS84 coordinate type
- XYZ.
CGCS2000 version - CGCS2000, CGCS2000 epoch - 2000.0, CGCS2000 coordinate type - XYZ .
Velocity parameter source - Based on the XYZ coordinates, use the XYZ to LBH tool on this
site to get the LBH coordinates. Then query the table Mean Velocity - Velocity Fields -
CGCS2000 for Mainland China 3x3 Degree Grid to get the velocity data.
The unit of velocity obtained from the table should be converted
from mm/a to m/a, i.e. divided by 1000.
The speeds of Urumqi, Changchun and Beijing stations are inverted as parameters.
Station WGS84 Coordinate CGCS2000 Coordinate Velocity Calculated CGCS2000 Residual N/A X (m) Y (m) Z (m) X (m) Y (m) Z (m) Vx (m/a) Vy (m/a) Vz (m/a) X (m) Y (m) Z (m) X (m) Y (m) Z (m) WUHN/Wuhan -2267749.426 5009154.287 3221290.704 -2267749.263 5009154.311 3221290.709 -0.0315 -0.0085 -0.0116 -2267749.271778932 5009154.346067069 3221290.738206169 -0.008778932 0.035067069 0.029206169 SHAO/Shanghai -2831733.505 4675665.951 3275369.429 -2831733.363 4675666.015 3275369.466 -0.0298 -0.0101 -0.0132 -2831733.3608287573 4675666.016929227 3275369.471364079 0.0022 0.001929227 0.005364079 LHAS/Lasa -106938.0326 5549269.52 3139215.874 -106937.804 5549269.587 3139215.789 -0.0443 -0.0087 0.0115 -106937.80822647549 5549269.582272761 3139215.79246651 -0.0042 -0.004727239 0.00346651 URUM/Urumqi 193030.6314 4606851.291 4393311.462 193030.540 4606851.298 4393311.455 0.0298 0.0023 -0.0014 193030.48642357028 4606851.295608156 4393311.448628469 -0.0536 -0.002391844 -0.006372 CHAN/Changchun -2674427.231 3757143.218 4391521.671 -2674427.313 3757143.205 4391521.625 0.0251 0.008 0.0102 -2674427.3606022364 3757143.1907928986 4391521.599623243 -0.0476 -0.01421 -0.025376757 BJFS/Beijing -2148744.083 4426641.273 4044655.927 -2148744.179 4426641.266 4044655.880 0.0293 0.0059 0.0107 -2148744.2322619907 4426641.2584007485 4044655.852110395 -0.05326 -0.0076 -0.027889605 -
Calculate Formula:
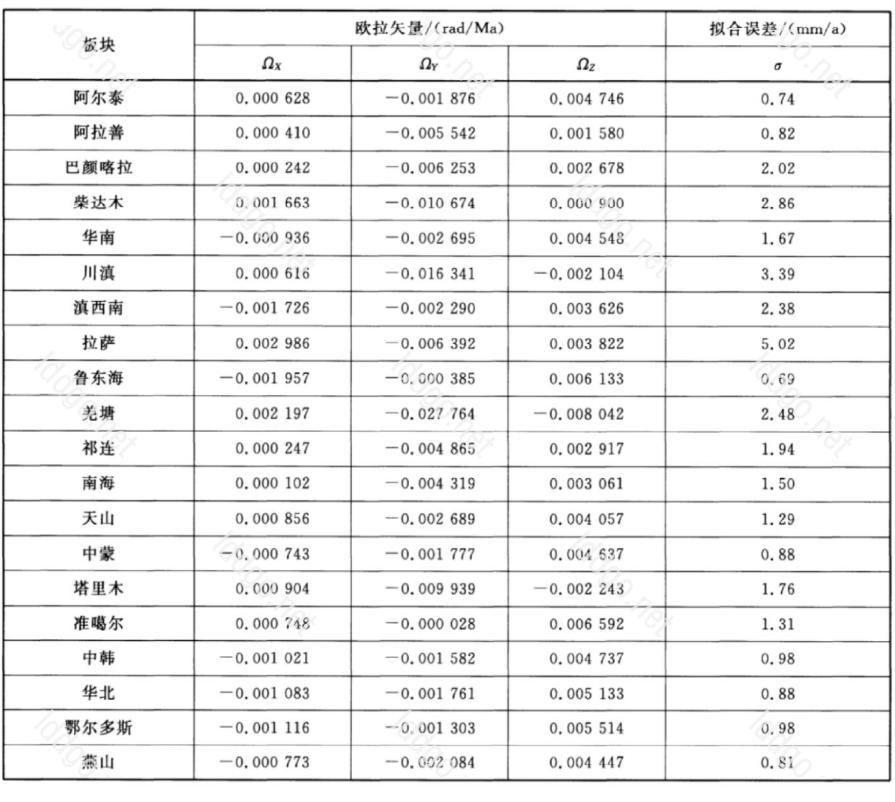
- Use Euler vectors to calculate station velocity formula:. In the formula, Vx, Vy, Vz are the calculated velocity value components. X, Y, Z are the coordinate of the station. Ωx, Ωy, Ωz are the Euler vector of the plate where the station is located.
-
Epoch calculation formula : from t0 to t .
In the formula, mr = 4.84813681*10⁻⁹ , is the conversion factor from milli-arcseconds mas to radians rad. - Correction formula for plate movement: . In the formula, tc is the observation epoch. t is the epoch to be converted. Xtc, Ytc, Ztc is the coordinate at the observation epoch tc. Xs, Ys, Zs is the speed value of the station.
-
Inter-frame coordinate formula: converts the coordinates of an ITRFyy frame to an
ITRFzz frame.
In formula [X Y Z]ITRFzz are the coordinates in the target ITRF frame. [X Y Z]ITRFyy are the coordinates in the input ITRF frame. Tx, Ty, Tz are the translation parameters. D is the scaling factor. Rx, Ry, Rz are the rotate parameters.
-
Parameters of the reference ellipsoid
Name Semi-major axis(a) Flattening Inverse(rf) WGS84 6378137 m 298.257223563 CGCS2000 6378137 m 298.257222101 -
Reference Documentation
- Transformation parameters between ITRF Solutions
-
Mean velocity of 3x3 degree grid in mainland China - Velocity field - CGCS2000 .
The statistical values of the difference between the calculated velocity values of
the grid points and their reference values are ±1.81 mm/a, ±1.05 mm/a, ±1.55 mm/a,
and the error of positional motion velocity ±2.61 mm/a, respectively.
±1.55 mm/a, and the error of positional motion velocity ±2.61 mm/a .
-
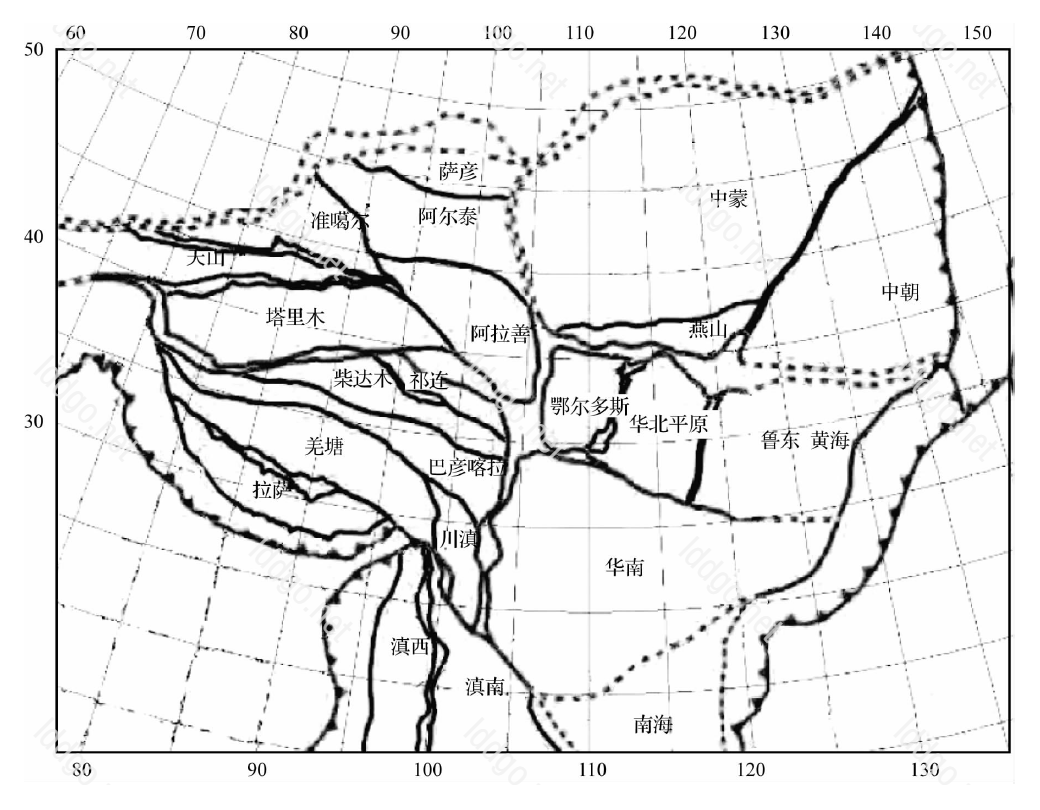
Technical Specification for Coordinate Conversion of Geodetic Control Points (CH/T
2014-2016), which contains 20 plates of Euler vector tables for CPM-CGCS2000.
-
This tool has a certain frequency limit, please use this tool reasonably.
Anonymous : 30/IP*Hour, Normal user : 30/Hour, VIP : 360/Hour, Senior VIP : 360/Hour.
Anonymous and normal users can only enter one set of coordinates at a time, and batch conversion is not supported. VIP and advanced VIP users support batch conversion.
